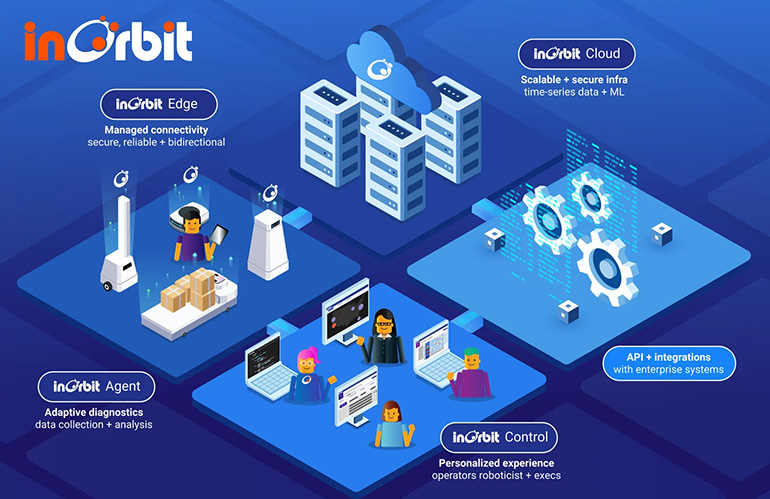
Developers using OpenRobOps can move up to InOrbit Ground Control as they scale. Source: InOrbit
For fleets of mobile robots to scale, they need robot operations tools. InOrbit Inc. today said it will contribute OpenRobOps to the open-source community. The company has also appointed industry veteran Steve Cousins to its board of directors to guide this effort.
Robotics developers have had to choose between building proprietary fleet management tools or sacrifice control in a “build vs. buy” dilemma, according to InOrbit.AI.
“I’ve talked to too many founders in robotics who are reinventing the wheel and failing to scale,” stated Florian Pestoni, founder and CEO of InOrbit. “By open-sourcing the core operations layer, we empower developers to own their data and infrastructure. End users can more easily orchestrate robots across vendors by using InOrbit Space Intelligence, our award-winning, AI-powered platform.”
OpenRobOps to help developers operate robots at scale
InOrbit said it built OpenRobOps (ORO or “gold” in Spanish) on its proven platform, which has already managed thousands of autonomous mobile robots (AMRs). The Mountain View, Calif.-based company plans to offer the software under a full open-source license later this year.
“ORO will provide developers with a transparent, self-hostable foundation for robot observability and management, democratizing access to the common infrastructure needed to operate robots at scale,” it said.

Source: InOrbit
How did InOrbit determine what to make open-source and what to retain in its own commercial offering?
“We’ve been developing and refining InOrbit for several years, working with a broad range of adopters and advancing the concept of RobOps or robot operations,” Pestoni replied to The Robot Report. “We have identified the core, common functionality that most people look for when they need a fleet manager for their mobile robots.”
“As we surveyed the open-source robotics ecosystem, we identified a big gap: the need for a fleet manager that works seamlessly with ROS on the device and Open RMF as the coordination framework,” he added. “OpenRobOps fills that gap.”
Developers who want advanced functionality and support can use InOrbit Ground Control. The company said this can help them upgrade as their needs grow or move from hosted to self-managed systems without changing their underlying data architectures.
“I think this will be based on what adopters prioritize. “InOrbit Ground Control is a fully-managed, cloud-based, highly-scalable solution that works out of the box, allowing companies to focus all their attention on deploying robots at scale,” said Pestoni. “OpenRobOps provides developers, whether in industry or in academia, full control over the data and experience they want to create for their end users.”
Cousins brings open-source experience
Steve Cousins is executive director of the Stanford Robotics Center and a founding board member of
the Open Source Robotics Foundation (OSRF). Cousins helped lead development and dissemination of the Robot Operating System (ROS) as CEO of Willow Garage, and he was among the first innovators to commercialize ROS as founder of Savioke (later Relay Robotics), noted InOrbit.

Source: InOrbit
“InOrbit is doing for fleet operations what ROS did for robot development,” said Cousins.
“Savioke was an early InOrbit customer, so I saw firsthand the value of the platform,” he recalled. “I joined the board because I see the need in the broader robotics community: standardizing the common infrastructure is necessary to unlock the next wave of innovation and scale.”
“Steve Cousins is a key figure in the robotics ecosystem. As president and CEO of Willow Garage, he led the team that ushered in modern, autonomous robots,” said Pestoni. “Steve brings a wealth of knowledge to InOrbit’s board of directors and is a strong supporter of the OpenRobOps open-source initiative.”
Community welcomes InOrbit moves
InOrbit said it is already working with partners across academia, industry, and service providers ahead of the general release of OpenRobOps. Several notable robotics leaders welcomed the ORO announcement.
“OpenRobOps fills an important role within the open-source robotics ecosystem, providing a fleet manager with native support for ROS and Open RMF,” said Geoffrey Biggs, chief technology officer (CTO) at Open Robotics.
Brian Gerkey, CTO at Intrinsic, an Alphabet company, said he was pleased about the addition to the robotics commons. “Robot researchers used to reinvent the wheel until ROS came along and provided the core building blocks,” he said. “Now OpenRobOps will bring similar building blocks to fleet management.”
Kärcher has used InOrbit Ground Control to scale its KIRA floor scrubber fleet. “OpenRobOps gives robotics companies worldwide access to commercial-grade operations software, a true game changer for the industry,” said Felipe Garcia Lopez, director of robotic systems at Kärcher.
Florencia Grosso, business director at Ekumen, said ORO will help bring world-class fleet management to the ROS ecosystem. “OpenRobOps accelerates the transition from lab to real world as a standard fleet management layer that integrates natively with ROS and Open RMF,” she added.
Other supporters include Dr. Lorenzo Masia, executive director of the Munich Institute for Robotics and Machine Intelligence (MIRMI) at the Technical University of Munich (TUM), and Ricardo Petrazzini, CEO of Robotic Crew.
“Open-source projects are only as strong as their community,” Pestoni noted. “As we continue the process of releasing OpenRobOps, we will share additional channels to engage with the broader community, whether online or at the annual RosCon event.”
After raising Series A funding in September 2025, InOrbit plans to open access to OpenRobOps to select early adopters first and then to the general public later this year.

The post InOrbit adds Steve Cousins to board, to offer OpenRobOps as open-source fleet manager appeared first on The Robot Report.